
Índice:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:37.
- Última modificação 2025-01-23 15:03.

Há algum tempo postei meu controlador Wifi PPM. Está funcionando muito bem. Apenas o alcance é um pouco curto. Eu encontrei uma solução para este problema. O ESP8266 oferece suporte a um modo chamado ESPNOW. Este modo é de nível muito mais baixo. Não perde a conexão tão facilmente e se perde a conexão é reconectado imediatamente.
Eu uso três ESP8266. Um é o receptor ESPNOW, o outro é o remetente ESPNOW e o terceiro é o ponto de acesso ao qual você pode se conectar. O terceiro é necessário porque o remetente ESPNOW não pode ser um ponto de acesso ao mesmo tempo. Eu também adicionei algumas antenas para obter um melhor alcance.
Há um segundo ponto de acesso diretamente no receptor. Se você se conectar a ele, terá o mesmo com o antigo projeto WifiPPM.
Também adicionei suporte para receptor de protocolo MSP. Este é o "Protocolo serial MultiWii" que é compatível com MultiWii, Betaflight, Cleanflight e muitos outros controladores de vôo.
Etapa 1: Lista de peças




Você precisa de três módulos ESP8266 de qualquer tipo. Mas você quer o melhor alcance. Por isso, sugiro usar módulos ESP8266 com antenas. Funciona também sem antenas. Eu uso as seguintes partes:
2 x ESP07 (módulo ESP8266 com conector de antena)
1 x ESP12
1 x 3dBi Mini Antena I-PEX U. FL IPX no lado do receptor
1 x ESP8266 2, 4/5 GHz 3dbi Wlan Wifi Antena SMA Stecker / macho + adaptador I-PEX no lado do remetente
Fonte de alimentação 3, 3 V para todos os módulos ESP8266
Você também precisa de um PC com IDE Arduino: https://www.arduino.cc/en/Main/SoftwareESP8266 suporte para IDE Arduino. Siga estas instruções: https://learn.sparkfun.com/tutorials/esp8266-thin… Websocket library para Arduino:
Etapa 2: Baixe e atualize os esboços



Você pode baixar os esboços aqui.
Descompacte o arquivo. Existem três pastas: Master-AP, Sender, Receiver
Master-AP: É o esboço do ponto de acesso. Abra o esboço com o IDE arduino. Defina a frequência da CPU para 160 MHz no menu de ferramentas e carregue o esboço para o ESP12.
Remetente: Esse é o esboço para o remetente do MSPNOW. Defina a frequência da CPU para 160 MHz e carregue-a em um dos ESP07.
Você pode ver na primeira foto como conectar o módulo ESP8266 para piscar.
Agora conecte o ESP12 (ponto de acesso) e as portas seriais e conexões de alimentação do Sender ESP07 (segunda foto): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Inicie os dois módulos e conecte ao ponto de acesso "Long-Range-WifiPPM / MSP". A senha é "WifiPPM / MSP"
Abra um navegador e abra o endereço IP 192.168.4.1. O site de controle aparecerá. Clique no botão "Informações Wifi". Uma caixa de mensagem com o MAC do remetente e o MAC do receptor aparecerá.
Abra o esboço do receptor no Arduino IDE. Altere a linha "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (terceira imagem) para o endereço Mac do remetente, que é exibido no site. O receptor Mac deve estar ok. Certifique-se de que a frequência da CPU esteja definida para 160 MHz e carregue o esboço para o segundo ESP05.
Etapa 3: Conecte o receptor ao controlador de vôo e configure o Cleanflight



Conecte agora o receptor ao controlador de vôo. Seu controlador de vôo deve ter uma saída de 3,3 volts com pelo menos 200 mA. Caso contrário, você precisa de um regulador de tensão adicional de 3, 3V.
Conecte o GND do ESP ao GND do controlador de vôo. Conecte o VCC do ESP a 3, 3 V do controlador de vôo ou ao regulador de tensão adicional de 3, 3 V.
Você pode usar a saída PPM ou a saída MSP serial.
Para saída MSP, conecte TX do ESP8266 a RX de qualquer porta serial de seu controlador de vôo. (Imagem 1)
Para saída PPM, conecte GPIO5 do ESP8266 à entrada PPM do controlador de vôo. (Imagem 1)
Depois de conectar o ESP, inicie o controlador de vôo e abra o cleanflight. Conecte-se com seu celular ao ponto de acesso "WifiPPM / MSP". A senha é "WifiPPM / MSP"
Para MSP: Abra a guia Portas e configure o MSP na porta serial que você conectou ao ESP8266 (Figura 2). Salve e reinicie. Vá para a guia de configuração e defina o receptor para "receptor serial MSP" (Figura 3). Salve e reinicie.
Para PPM: Leia no manual do seu controlador de vôo como configurar o PPMGo na guia de configuração e defina o receptor para "receptor PPM" (Figura 4). Salve e reinicie.
A próxima configuração é para os dois receptores da mesma forma: Vá para a guia do receptor. Ajuste os canais para "RTAE1234" (Figura 5 / Vídeo). Salve a configuração.
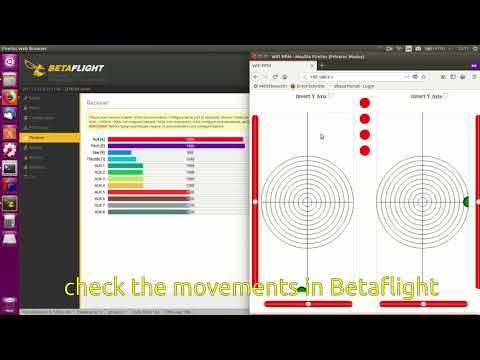
Agora abra um navegador em seu smartphone. Abra o site 192.168.4.1 (Figura 6). Agora você pode verificar o controlador.
Se estiver funcionando, inicie os dois remetentes ESP8266. Conecte-se ao ponto de acesso "Long Range WifiPPM / MSP". A senha é "WifiPPM / MSP". Abra novamente o site 192.168.4.1. Verifique novamente em cleanflight se está funcionando.
Conecte as antenas aos módulos ESP07.
Etapa 4: mais algumas informações

Existem dois pontos de acesso em operação normal. O ponto de acesso "WifiPPM / MSP" é como o projeto WifiPPM anterior. Você pode usá-lo se quiser apenas fazer um vôo rápido sem conectar nenhum módulo adicional quando não precisar de uma conexão de longo alcance. Se você se conectar a "Long Range WifiPPM / MSP", o controlador de longo alcance assumirá o controle.
Talvez você queira saber quanto tempo é "longo alcance". Na verdade, eu realmente não sei. São pelo menos algumas centenas de metros. Mas não pude testar até agora. Não perde a conexão em meu apartamento completo.
Eu adicionei o controle MSP porque pensei que poderia fazer um canal de apoio para dados de telemetria. Mas isso nunca funcionou estável. De qualquer forma, o protocolo MSP é mais preciso do que o ppm, porque não depende tanto do tempo. Talvez cause problemas com controladores de vôo lentos porque há tráfego intenso na porta serial. Com meu controlador de vôo Noxe F4 funciona sem problemas.
Se você tiver qualquer problema de configuração, dê uma olhada no antigo projeto WifiPPM.
Recomendado:
Introdução aos sensores de vibração e temperatura sem fio de longo alcance: 7 etapas

Introdução aos sensores de vibração e temperatura sem fio de longo alcance: Às vezes, a vibração é a causa de problemas sérios em muitas aplicações. De eixos e rolamentos da máquina ao desempenho do disco rígido, a vibração causa danos à máquina, substituição antecipada, baixo desempenho e inflige um grande impacto na precisão. Monitorando
Node-RED com sensor de temperatura e vibração de longo alcance IoT: 34 etapas

Node-RED com sensor de temperatura e vibração de longo alcance IoT: Apresentando o sensor de temperatura e umidade sem fio de longo alcance da NCD, com alcance de até 28 milhas usando uma arquitetura de rede mesh sem fio. Incorporar o sensor de temperatura e umidade Honeywell HIH9130 transmite a temperatura de alta precisão e
Sensor de proximidade infravermelho de longo alcance: 3 etapas

Sensor de proximidade infravermelho de longo alcance: Os sensores infravermelhos são o melhor módulo para detecção de objetos, mas o problema é que ele funciona em um alcance muito curto. neste artigo, vamos compartilhar como você pode aumentar o intervalo e quais fatores afetam o intervalo
Indicador de nível de água sem fio de longo alcance com alarme - Alcance até 1 Km - Sete níveis: 7 etapas

Indicador de nível de água sem fio de longo alcance com alarme | Alcance até 1 Km | Sete níveis: assista no Youtube: https://youtu.be/vdq5BanVS0YVocê pode ter visto muitos indicadores de nível de água com e sem fio que forneceriam um alcance de 100 a 200 metros. Mas neste instrutível, você verá um Indi de nível de água sem fio de longo alcance
Scanner WiFi de longo alcance usando ESP8266: 6 etapas (com imagens)
")
Scanner WiFi de longo alcance usando ESP8266: Neste Instructable, eu faço um dispositivo portátil de varredura WiFi de 2,5 bandas de longo alcance alimentado por bateria usado para determinar qual canal é o melhor para minha rede doméstica. Também pode ser usado para localizar pontos de acesso Wi-Fi abertos em movimento. Custo de produção: cerca de $ 25 dolla