")
Índice:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:39.
- Última modificação 2025-01-23 15:03.


A LEGO Catapult é feita para crianças que não gostam de tomar comprimidos. Quero tornar o comportamento relutante mais agradável para as crianças. Eu amo LEGO e Arduino, então crio um projeto combinando-os. Você pode lançar uma pílula pressionando um botão.
NOTA: Não vou fornecer instruções perfeitas de A a Z LEGO. Crie seu próprio design com LEGO.
Etapa 1: vá buscar as coisas

Você vai precisar de:
- Materiais
- (x1) Arduino nano (V3.0 ATmega328P)
- (x1) Botão tátil (painel de 12 x 12 mm x 4,3 mm)
- (x1) Servo motor padrão (Futaba S3003 Servo padrão)
- (x1) Suporte da caixa de bateria de 9V (suporte da caixa com chave seletora LIGA / DESLIGA)
- (x1) Bateria de 9 V (baterias alcalinas Duracell Procell)
- (x1) Placa PCB (Kit de Protótipo Dupla Face)
- (x1) resistor de 10KΩ
- (x1) Elástico normal (apenas normal)
- (x1) LEGO (Estúdio de Arquitetura + Angry Birds 75822)
- Ferramentas
Kits de solda
Etapa 2: solda


- O servo motor se conecta a D3, 5V e GND.
- O botão se conecta a D5, 5V e GND (conecta o resistor de 10K entre uma perna do botão e o GND).
Use a placa PCB com o mínimo de placa PCB possível para colocar todos os materiais no gabinete. Conecte o Arduino Nano à parte inferior da placa PCB. E vire o quadro e coloque o botão na terceira imagem.
1. Servo motor
O servo motor possui três fios. O fio vermelho se conecta ao pino 5V, O fio preto se conecta ao pino GND, O fio amarelo se conecta a um pino digital.
O servo motor se conecta a… Vermelho: 5 V, Preto: GND e Amarelo: D3 (pino digital).
2. Botão (consulte a primeira imagem)
O botão tem quatro pernas. Solde uma perna a um resistor de 10KΩ e conecte os fios ao pino GND. Outra perna se conecta ao pino D5 com um fio. e se conecta ao pino de 5V. A outra perna se conecta ao pino 5V.
3. Caixa de bateria de 9V
Possui dois fios. O fio vermelho é para "+" e o fio preto é para "-". Conecte o fio vermelho ao pino VIN do Arduino e conecte o fio preto ao pino GND do Arduino.
Etapa 3: Código
Baixe o arquivo e envie o código para o Arduino Nano por meio do programa Arduino. Se você não tem o programa, siga as dicas abaixo.
O código é como …
- Pressione um botão para girar a roda do servo em 30 graus.
- Pressione um botão novamente para girar a roda do servo a 100 graus.
Pontas:
- Você precisa fazer o download do programa Arduino em seu computador primeiro. Você pode baixar aqui.
- Baixe e clique no arquivo "*.ino".
- Conecte o Arduino Nano ao computador com um cabo USB.
- Altere as configurações: "Ferramentas> Placa: Arduino Nano."
- Pressione o botão "->" para fazer o upload do código para o seu Nano.
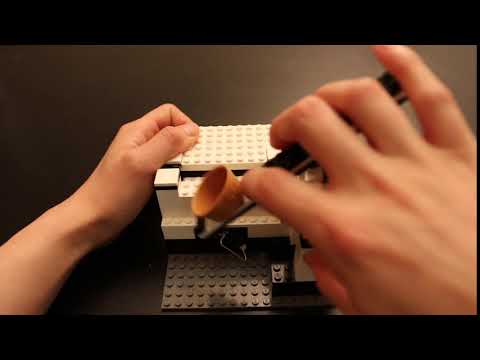
Etapa 4: cola: roda servo



Conecte o fio de aço "em forma de C" e a servo-roda de 180 graus com a pistola de cola. Após a colagem, insira a roda no motor (como a linha vermelha da terceira foto).
Etapa 5: construir o Lego




Obtenha uma placa 16x16 em shop.lego.com para o fundo. Não tenho instruções completas de construção. Seja criativo!
Pontas:
1. Caixa grande: 10x12x7 (tamanho do tijolo) para inserir as coisas do Arduino.
- Buraco do botão tátil: 2x2 (tamanho do tijolo).
- Furo do servo motor: 5x2 (tamanho do tijolo).
2. Torre do quadro (x2): 4x2x11 (tamanho do tijolo).
3. Alavanca: 20x2x1 (tamanho do tijolo).
4. Coloque um elástico no bloco de lego (veja a última imagem).
Etapa 6: Concluído

Jogue com seus filhos ou amigos!
Pontas:
- Pressione o botão para pendurar a alavanca e pressione novamente para soltá-la.
- Desligue a bateria quando você não jogar.
Recomendado:
Tire ótimas fotos com um iPhone: 9 etapas (com fotos)
")
Tire ótimas fotos com um IPhone: a maioria de nós carrega um smartphone conosco para todos os lugares atualmente, por isso é importante saber como usar a câmera do smartphone para tirar ótimas fotos! Só tenho um smartphone há alguns anos e adoro ter uma câmera decente para documentar coisas que eu
Cabine de fotos de casamento Arduino - peças impressas em 3D, automatizadas e de baixo orçamento: 22 etapas (com fotos)
")
Arduino Wedding Photo Booth - peças impressas em 3D, automatizadas e de baixo orçamento: Recentemente fui convidado para o casamento do irmão do meu parceiro e eles perguntaram se poderíamos construir uma cabine fotográfica para eles, pois seu aluguel é muito caro. Isso é o que nós pensamos e depois de vários elogios, decidi transformá-lo em um instrutivo
Lego Lego Skull Man: 6 etapas (com fotos)
")
Lego Lego Skull Man: Olá, hoje vou ensinar a você como fazer uma bateria bacana com led lego skull man. Isso seria ótimo para o Dia das Bruxas, que está chegando em breve. Ou seria até mesmo um grande projeto simples de fazer quando sua prancha ou apenas um pequeno pedaço de manto
Lance sua apresentação de slides de fotos de férias com um toque de mágica!: 9 etapas (com fotos)
")
Lance sua apresentação de slides de fotos de férias com um toque de magia! Ao longo dos anos, desenvolvi o hábito de levar uma pequena estatueta comigo quando viajava: geralmente compro um pequeno objeto em branco (como o da foto) e pinto para combinar com a bandeira e o tema do país que estou visitando (neste caso, a Sicília). T
Transferência de fotos para lata de refrigerante: 7 etapas (com fotos)
")
Transferência de fotos para uma lata de refrigerante: Este manual mostra uma maneira fácil e rápida de como transferir fotos para uma lata de refrigerante. O processo básico é copiar a foto primeiro em um papel comum. Em seguida, você transfere a foto para um filme autoadesivo. Depois disso, você limita o filme a