")
Índice:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:39.
- Última modificação 2025-01-23 15:03.

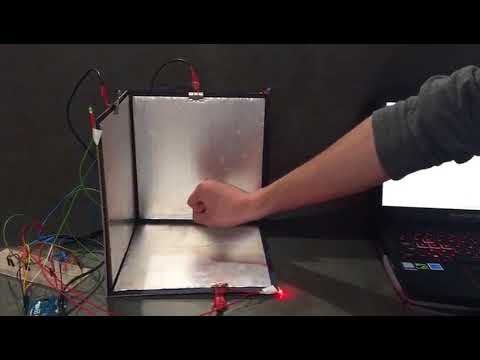

Nesta instrução é explicado como o movimento de uma mão pode ser rastreado em um espaço 3D usando o princípio de detecção capacitiva. Alterando a distância entre uma folha de alumínio carregada e sua mão, a capacidade do capacitor irá variar. Este método pode ser usado como uma alternativa de baixo custo para sistemas inerciais e ópticos para rastrear o movimento no espaço 3D. Neste protótipo, adicionamos LEDs que brilharão quando o objeto se mover muito perto da folha de alumínio.
Etapa 1: Ferramentas e materiais necessários
- 3 resistor de 270k Ohm
- 3 resistor de 10k Ohm
- 3 garras jacaré
- 1 LED vermelho
- 1 LED azul
- 1 LED verde
- 3 resistor de 220 Ohm
- solda
- Termoencolhível
- Cabo blindado
- Arduino Uno
- Folha de alumínio
- Cartão
- fita
- cola spray
- breadboard
- Fios de conexão (comprimentos variados)
Etapa 2: Construindo a Estrutura




Corte três pedaços quadrados de papelão (250x250 mm) e três pedaços quadrados de folha de alumínio (230x230 mm). Aplique cola spray em um lado da folha de alumínio e aplique cada um nos pedaços de papelão. Neste protótipo, as folhas de alumínio atuarão como nossos sensores capacitivos. Portanto, certifique-se de que há espaço suficiente entre a folha de alumínio e a borda do papelão, para que não haja contato entre as diferentes folhas de folha uma vez que a moldura seja montada. Uma vez que a folha é aplicada ao papelão, é hora de montar os três pedaços de papelão usando fita adesiva para completar a moldura. Novamente, certifique-se de que não haja contato entre as diferentes folhas de papel alumínio.
Etapa 3: Fiação dos fios blindados para a placa e o Arduino



É importante usar um cabo blindado para conectar as folhas ao circuito. O uso de cabos normais irá gerar um efeito de antena e interferir nas leituras do sensor. Certifique-se de ter 3 cabos blindados com cerca de 50 cm de comprimento. Pegue um cabo, descasque o fio, corte os fios de blindagem e use apenas o fio interno para conectá-lo soldando o fio à garra jacaré. Certifique-se de aplicar um termorretrátil para cobrir a conexão de solda. Prenda as pinças jacaré na folha de alumínio.
Conecte todos os fios de blindagem à linha positiva de sua placa de ensaio. Em seguida, conecte essa linha positiva à conexão de 5 V em seu Arduino. Agora pegue o fio principal do cabo blindado e conecte um resistor de 10k Ohm e 220k Ohm em paralelo. Conecte-o à porta de saída do seu Arduino (usamos 8, 9 e 10).
Repita esta etapa mais 2 vezes para os outros planos do protótipo.
Etapa 4: Fiação dos LEDs




Solde as pontas dos LEDs em um fio longo para que ele alcance os cantos das respectivas placas da placa arduino.
Usamos os pinos 2, 3 e 4 como os pinos de saída para nossos LEDs. Esta saída é conectada à placa de ensaio e conectada à perna positiva do LED. A perna negativa do LED é então conectada ao resistor de 330 Ohm. A outra extremidade do resistor é conectada ao aterramento da placa de ensaio, que é conectada ao aterramento do Arduino. Repita isso para todos os 3 LEDs. Em nosso protótipo, o LED azul está conectado ao plano Y, o LED vermelho ao plano Z e o LED verde ao plano X. Cole os LEDs nos planos correspondentes para obter feedback direto ao usar o protótipo.
Se você não usa uma placa de ensaio e deseja conectar o cabo blindado diretamente ao Arduino, pode ver a imagem anexada para uma boa visão geral das conexões de solda. Suas conexões finais devem ser semelhantes à imagem de visão geral.
Etapa 5: codificação
No anexo colocamos o código que usamos para este experimento. Para insights extras, após cada comando principal, um comentário é colocado, explicando o que está acontecendo no código. Abra o código em seu software Arduino em seu PC e carregue-o para seu Arduino. Se você estiver usando um laptop, certifique-se de que ele esteja sendo carregado; caso contrário, seu protótipo não funcionará.
Etapa 6: usando o protótipo
Esta forma de rastreamento de movimento 3D é muito sensível para as variáveis circundantes. Portanto, certifique-se de calibrar os valores no código para sua própria situação. Você pode simplesmente usar o monitor serial para obter os valores corretos. Dica: você mesmo pode construir uma calibração, onde leva os valores médios + 10% ao executar o código. No vídeo é demonstrado como o protótipo deve funcionar corretamente.
Recomendado:
Detecção de movimento e escuridão na luz noturna - Sem micro: 7 etapas (com imagens)
")
Detecção de movimento e escuridão da luz noturna - Sem micro: este instrumento evita que você dê uma topada no dedo do pé ao caminhar por um quarto escuro. Você poderia dizer que é para sua própria segurança se acordar à noite e tentar chegar à porta com segurança. Claro que você pode usar uma lâmpada de cabeceira ou a li
Sistema de alarme por SMS com detecção de movimento DIY: 5 etapas (com imagens)
")
DIY Motion Detection SMS Alarm System: Neste projeto combinarei um sensor de movimento PIR barato com um módulo TC35 GSM para construir um sistema de alarme que envia a você um " ALERTA DE INTRUSÃO " Envie SMS sempre que alguém tentar roubar suas coisas. Vamos começar
QeMotion - rastreamento de movimento para cada fone de ouvido !: 5 etapas (com imagens)
")
QeMotion - Rastreamento de movimento para todos os fones de ouvido !: Visão geral: este dispositivo permite que você utilize o movimento da cabeça para acionar eventos em basicamente qualquer videogame. Ele funciona rastreando o movimento de sua cabeça (ou fone de ouvido) e acionando pressionamentos de teclado para certos movimentos. Então, seu comp
A webcam mais fácil como uma câmera de segurança - Detecção de movimento e fotos enviadas por e-mail: 4 etapas

Webcam mais fácil como uma câmera de segurança - Detecção de movimento e imagens enviadas por e-mail: Você não precisa mais baixar ou configurar o software para obter as imagens detectadas de movimento da sua webcam para o seu e-mail - basta usar o navegador. Use um navegador Firefox, Chrome, Edge ou Opera atualizado no Windows, Mac ou Android para capturar a imagem
Saída controlada por movimento - De uma luz com detecção de movimento: 6 etapas

Tomada controlada por movimento - a partir de uma luz com detecção de movimento: Imagine que você é um doce ou travessura indo para a casa mais assustadora do quarteirão. Depois de passar por todos os ghouls, fantasmas e cemitérios, você finalmente chega ao último caminho. Você pode ver o doce em uma tigela à sua frente! Mas de repente um gho