: 8 Passos (com Imagens)")
Índice:
- Etapa 1: Materiais para o Projeto
- Etapa 2: Parte 1: Criando Movimento Liner para Escritor
- Etapa 3: Parte 2: Cabeça do gravador (movimento para cima e para baixo)
- Etapa 4: Parte 3: Rolo de papel
- Etapa 5: Parte 4: Integração do Módulo Bluetooth
- Etapa 6: Parte 5: montar tudo
- Etapa 7: Torne o circuito compacto
- Etapa 8: vamos imprimir em Braille
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:38.
- Última modificação 2025-01-23 15:03.


Olá pessoal, Tudo isso começou fazendo um plotter XY simples depois de completá-lo com sucesso, pensei em desenvolver um conversor de texto simples de fala para braille. Comecei a pesquisar online e inesperadamente os preços eram muito altos, o que me impulsionou a construir um pequeno escritor portátil e barato.
Como sabemos que tudo o que pensamos em construir, pode existir ou pelo menos ser tentado por alguém, então comecei a procurar essa máquina de escrever. Recebi um vídeo que era bastante grande e barulhento, então pensei em colocar meu próprio sabor que é pequeno, portátil e fácil de usar.
Honestamente, sou novo no Arduino e ainda estou aprendendo. Consegui construir uma plotadora XY com sucesso, então minhas esperanças eram altas, com o mesmo conhecimento que posso usar meu próprio pequeno escritor braille. Portanto, neste processo, aprendi muito e finalmente consegui desenvolvê-lo em apenas 2 semanas.
Então, aqui vai como construir um escritor braille simples.
Etapa 1: Materiais para o Projeto
- Arduino Nano
- Driver A4988 Stepper
- Módulo Transceptor Serial Bluetooth
- CD drive deslizante motor deslizante guia linear micro
- Servo motor de rotação de 360 graus de 2 peças
- Servo motor de 180 graus de 1 peça
- 2 peças de seringa de injeção (em loja de medicamentos)
- 1 peça de folha de acrílico transparente
- Fita de Espuma Dupla Face
- Fevi Kwik
- Fio jumper macho-fêmea
- Conjunto de ferramentas de corte e chave de fenda.
- Gel / Caneta Esferográfica
- Celular com recurso Bluetooth
- APP: Arduino Voice Control
Agora vamos construí-lo
-
O projeto total pode ser dividido em 4 pequenas partes
- Configuração do módulo de revestimento (usando o driver A4988)
- Criando movimento para cima e para baixo para a cabeça do escritor
- Rolo para enrolar papel
- Integração Bluetooth
- No final é preciso montar todas as peças que levarão à conclusão do projeto.
Etapa 2: Parte 1: Criando Movimento Liner para Escritor

Precisamos ir e vir para escrever o material no jornal. Há uma abundância de vídeos disponíveis para criar esse movimento mecânico usando métodos diferentes. Mas, usando um motor de passo, podemos fazer isso facilmente e com alta precisão.
Então, para evitar a criação de material mecânico, usei um motor de passo que vem com um controle deslizante, você pode construí-lo por conta própria, se estiver interessado em construir o seu próprio, você pode seguir este link.
Uma vez que a parte mecânica é feita, temos que seguir os passos para fazer a configuração elétrica
- Siga a imagem para fazer a configuração do circuito.
-
Certifique-se de colocar
- Pino 6: ativar
- Pino 5: Etapa
- Pino 4: Direção
- Carregue o código de basicMove2 em seu Arduino nano e abra o monitor serial e use "f" para encaminhamento e "b" para trás e teste seu circuito. Verifique se você consegue obter o movimento linear adequado ou não com precisão.
- Você pode usar uma série de fbfbffbbfffbbb como comando também.
Etapa 3: Parte 2: Cabeça do gravador (movimento para cima e para baixo)
")
")
")
")
Existem diferentes maneiras de fazer o movimento para cima e para baixo. Você pode fazer isso usando um atuador solenóide. Mas aqui estou usando uma caneta simples para isso com ajuda de um servo motor.
- Pegue qualquer esferográfica simples com recarga removível.
- Crie um orifício na parte superior após empurrar o refil para dentro, certifique-se de que o orifício deve passar pelos dois lados da caneta e reabastecer.
- Crie outro orifício no refil e prenda um barbante nele.
- Coloque o refil de volta e crie um orifício na caneta abaixo do orifício do refile, certifique-se de fazê-lo pelo menos 2-3 cm abaixo do refile.
- Agora amarre uma borracha elástica no topo com uma caneta e reabasteça.
- Use o servo motor de 180 graus, defina-o para 0 graus e prenda a corda no nó.
- Agora, quando o nob girar 180 no sentido anti-horário, o refil será puxado para fora e quando ele voltar a 0 graus por causa do elástico na parte superior, ele voltará para dentro.
- Anexe o pino de sinal ao pino número 8 no Arduino nano.
- Carregue o código do basicMove2 em seu Arduino nano e abra o monitor serial e use "n" e teste seu circuito.
- Você também pode usar uma série de comandos nnnnnnnnn e verificar se está funcionando ou não.
- Aumente o ângulo de rotação decrescente para obter o movimento desejado.
Etapa 4: Parte 3: Rolo de papel



Já o rolo de papel, é a parte mais interessante e desafiadora.
- Remova a borracha da seringa de injeção.
- Corte a engrenagem de plástico em um círculo.
- Coloque na borracha e aplique um pouco de cola.
- Fixe-o no servo e prenda-o com cola.
- Crie outro como acima.
- Conecte o pino de sinal aos pinos número 9 e 10 no Arduino nano.
- Carregue o código do basicMove2 em seu Arduino nano e abra o monitor serial e use "p" e teste seu circuito.
- Você também pode usar uma série de comandos pppppppppp e verificar se está funcionando ou não.
- Aumente o ângulo de rotação decrescente para obter a velocidade desejada.
- Tente ajustar a velocidade mudando o potenciômetro que está presente dentro do servo.
- Faça a rotação na mesma direção e velocidade (este é o trabalho mais importante e tedioso).
Etapa 5: Parte 4: Integração do Módulo Bluetooth

Esta parte é a mais fácil.
- Faça a configuração do circuito acima e está feito.
- Isso o ajudará a enviar comandos de voz usando o Arduino Voice Control.
- Você pode pesquisar "Módulo Arduino Bluetooth hc-05" no google e obter exemplos legais.
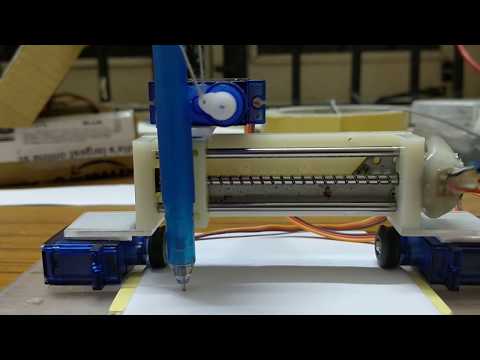
Etapa 6: Parte 5: montar tudo



Agora vamos montar todas as nossas quatro partes.
- Limpe a folha.
- Usando fita dupla, adicione servos motor conforme mostrado na figura.
- Anexe um pedaço extra de plástico no controle deslizante linear e coloque-o em cima de dois servos.
- Certifique-se de colocá-lo paralelo ao rolo de papel.
- Agora prenda a cabeça da caneta, certifique-se de que ela não toque a superfície e na rotação do servo ela deve fazer um orifício na fita.
- Anexe o pino Arduino nano.
- Carregue o código do basicMove2 em seu Arduino nano.
-
Abra o monitor serial e verifique todos os comandos
- f para encaminhamento
- b para trás
- p para enrolar papel
- n para mover a caneta para cima e para baixo.
- Depois de verificada toda a função, ela está pronta para impressão em Braille.
Etapa 7: Torne o circuito compacto




Faça o fluxo da imagem para fazer o circuito em uma placa de ensaio pequena e única.
Etapa 8: vamos imprimir em Braille

- Abra o arquivo Brallie.ino, abra o monitor serial do Arduino IDE.
- Coloque o papel sob o motor do papel para enrolar.
- Envie algum espaço, ou seja, ("") no comando e clique em Enter.
- O papel deslizará para dentro.
- Faça isso até passar pela cabeça do escritor.
- Em seguida, você pode enviar seu comando no monitor, o texto real.
- Abra seu aplicativo Bluetooth, conecte-se ao Bluetooth e envie o comando de voz.
- vire o papel para ver a linguagem braille.
- Tentei algumas palavras como oi, olá e bem-vindo, você pode ver o exemplo de papel de saída.
-
Você pode alterar os parâmetros abaixo no código para obter os resultados específicos para você.
- Espaço entre as colunas braille: etapas internas = 30;
- Espaço de linha entre os primeiros dois pontos do braille e as próximas duas linhas de pontos: int paperLine = 250;
- Velocidade do controle deslizante linear: int stepperDelay = 500;
- Velocidade da cabeça de gravação: int servodelay = 500;
- Número de caracteres por linha: int n = 10;
Recomendado:
Escritor de código Morse do Arduino: 7 etapas (com imagens)
")
Escritor de código Morse do Arduino: Eu fiz um robô que pode converter qualquer texto em código Morse e depois escrevê-lo !! É feito de papelão e Lego e para a parte eletrônica usei o Arduino e apenas dois motores
Reconhecimento de fala usando a API de fala do Google e Python: 4 etapas

Reconhecimento de fala usando Google Speech API e Python: Speech RecognitionSpeech Recognition é uma parte do processamento de linguagem natural, que é um subcampo da inteligência artificial. Simplificando, o reconhecimento de fala é a capacidade de um software de computador de identificar palavras e frases na linguagem falada
MiniFig gigante de Lego Hulk em movimento e fala (escala de 10: 1): 14 etapas (com imagens)
: 14 etapas (com imagens)")
Movendo e falando Lego Hulk MiniFig gigante (escala 10: 1): Eu sempre joguei com legos quando criança, mas eu não tinha nenhum dos legos 'extravagantes', apenas peças clássicas de lego. Eu também sou um grande fã do Universo Cinematográfico Marvel (MCU) e meu personagem favorito é Hulk. Então, por que não combinar os dois e fazer um gigante
Luz reativa para música -- Como tornar uma luz reativa para música super simples para tornar a área de trabalho incrível: 5 etapas (com imagens)
")
Música reativa luz || Como fazer música super simples luz reativa para tornar a área de trabalho incrível .: Ei, e aí galera, hoje vamos construir um projeto muito interessante. Hoje vamos construir uma luz reativa musical. O led mudará seu brilho de acordo com o baixo, que na verdade é um sinal de áudio de baixa frequência. É muito simples de construir. Vamos
O Alto Escritor: 4 Passos

The High Writer: O escritor KATSU de NYC demonstra a funcionalidade da ferramenta mais recente do Graffiti Research Lab: The High Writer. Baseando-se em designs anteriores de mastros de pintura de inovadores como Barry McGee e Citizens Against Ugly Street Spam, o High Writer é