")
Índice:
- Etapa 1: Assistir meu projeto funcionando
- Etapa 2: Obtenha todo o material
- Etapa 3: Faça o upload do programa para a placa Arduino
- Etapa 4: coloque as trilhas e faça o layout
- Etapa 5: um esquema de circuito é sempre útil
- Etapa 6: conecte as torneiras à saída da placa do driver L298N
- Etapa 7: conecte a trilha do alimentador de força à outra saída da placa do driver L298N
- Etapa 8: Conecte a placa de driver L298N aos pinos de alimentação da placa Arduino
- Etapa 9: conectar o sensor à placa Arduino
- Etapa 10: Conecte os pinos de entrada do driver do motor à placa Arduino
- Etapa 11: coloque o trem nos trilhos
- Etapa 12: Ligue o Setup
- Etapa 13: ESTÁ FEITO
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:35.
- Última modificação 2025-01-23 15:03.

Fazer layouts de trem modelo é um ótimo hobby, automatizar o tornará muito melhor! Vejamos algumas das vantagens de sua automação:
- Operação de baixo custo: Todo o layout é controlado por um microcontrolador Arduino, usando um driver de motor L298N, seu custo é quase nada em comparação com os reguladores de controle de trem tradicionais e pacotes de energia.
- Ideal para colocar em um display: como nenhuma interferência humana é necessária para manter o controle do layout, você pode usá-lo em um display onde não pode estar sempre presente para controlar o trem e as saídas.
- Ótimo para entusiastas de microcontroladores: se você é ou deseja começar com Arduino e programação, este é um ótimo projeto para você praticar suas habilidades.
Se você estiver interessado, também pode conferir a versão anterior deste projeto que é ainda mais simples.
Então, sem mais delongas, vamos começar!
Etapa 1: Assistir meu projeto funcionando


Etapa 2: Obtenha todo o material

Para começar, certifique-se de ter todos os seguintes:
- Uma placa de microcontrolador Arduino, UNO é preferível.
- Uma placa de driver de motor de ponte H dupla L298N.
- 6 fios de jumper macho para macho.
- 7 fios de jumper macho para fêmea.
- Uma chave de fenda.
- Um adaptador de fonte de alimentação de 12 volts-DC.
- Um segmento de pista com sensor de proximidade IR conectado na parte inferior (usei uma pista Kato S62)
Etapa 3: Faça o upload do programa para a placa Arduino
Baixe o IDE do Arduino aqui, caso não o tenha em seu computador. Em seguida, baixe e abra o arquivo fornecido.
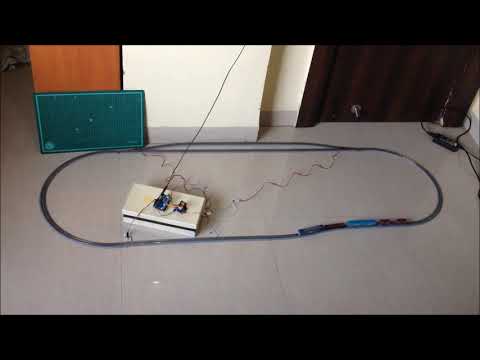
Etapa 4: coloque as trilhas e faça o layout

Faça um laço oval com um tapume de passagem, como mostrado acima. Certifique-se de que a distância entre a pista do sensor e a primeira curva que o trem cruzará depois de cruzar a pista do sensor seja maior do que o comprimento do trem, de modo que nenhuma parte do trem esteja sobre a pista do sensor quando ela cruzar a curva do sensor.
Etapa 5: um esquema de circuito é sempre útil

Clique na imagem para ter uma visão completa. Certifique-se de percorrer todo o esquema do circuito e todos os detalhes antes de prosseguir.
Etapa 6: conecte as torneiras à saída da placa do driver L298N




Conecte os fios vermelho e preto de ambas as saídas respectivamente, resultando em uma conexão paralela. Em seguida, conecte os fios vermelhos ao out4 e os fios pretos ao terminal out3 da placa do motor.
Etapa 7: conecte a trilha do alimentador de força à outra saída da placa do driver L298N


Conecte o fio branco do alimentador de força à saída1 e o fio azul ao terminal saída2 da placa acionadora do motor.
Etapa 8: Conecte a placa de driver L298N aos pinos de alimentação da placa Arduino

Conecte o pino de 12 volts ao pino VIN da placa Arduino, o pino GND ao pino GND da placa Arduino e, de preferência, o pino de 5 volts do driver do motor ao pino de 5 volts da placa Arduino.
Etapa 9: conectar o sensor à placa Arduino

Conecte o pino VCC do sensor ao pino de 5 volts da placa Arduino, o pino GND ao pino GND da placa Arduino e o pino OUT ao pino A0 da placa Arduino.
Etapa 10: Conecte os pinos de entrada do driver do motor à placa Arduino

Conecte os pinos digitais da placa Arduino aos pinos de entrada da placa do driver do motor da seguinte maneira:
- D9 a IN1
- D10 a IN2
- D11 a IN3
- D12 a IN4
Etapa 11: coloque o trem nos trilhos

Depois de verificar todas as conexões da fiação, coloque o trem no tapume.
Etapa 12: Ligue o Setup

Energize o setup e certifique-se de que os disjuntores sejam trocados para o tapume, senão inverta as conexões dos disjuntores feitas com o acionador do motor. Além disso, certifique-se de que o trem comece a se mover para a frente. Inverta a conexão do trilho alimentador com o motorista do motor se o trem se mover na direção errada.
Etapa 13: ESTÁ FEITO
O projeto está concluído, por enquanto. Você pode mexer no código do Arduino para alterar a funcionalidade do layout, adicionar mais desvios, é tudo personalizável! Eu adoraria saber sobre quaisquer modificações que você fizer neste projeto, deixe-me saber nos comentários abaixo. Tudo de bom!
Recomendado:
Layout de modelo de ferrovia automatizado com dois trens (V2.0) - Baseado em Arduino: 15 etapas (com imagens)
 - Baseado em Arduino: 15 etapas (com imagens)")
Layout de modelo de ferrovia automatizado com dois trens (V2.0) | Baseado em Arduino: automatizar layouts de modelos de ferrovias usando microcontroladores Arduino é uma ótima maneira de mesclar microcontroladores, programar e modelar ferrovias em um só hobby. Existem vários projetos disponíveis para operar um trem de forma autônoma em um modelo railroa
Layout da ferrovia do modelo automatizado simples - Arduino controlado: 11 etapas (com imagens)
")
Layout da ferrovia do modelo automatizado simples | Arduino controlado: os microcontroladores Arduino são um ótimo complemento para modelar ferrovias, especialmente quando se trata de automação. Esta é uma maneira simples e fácil de começar a usar modelos de automação de ferrovias com o Arduino. Então, sem mais delongas, vamos começar
Layout de modelo de ferrovia automatizado com loops reversos: 14 etapas

Layout de modelo de ferrovia automatizado com loops reversos: Em um de meus Instructables anteriores, mostrei como fazer um modelo de ferrovia simples automatizado ponto a ponto. Uma das principais desvantagens desse projeto era que o trem precisava se mover no sentido inverso para voltar ao ponto de partida. R
Layout de modelo de ferrovia com tapume de passagem automatizado (V2.0): 13 etapas (com fotos)
: 13 etapas (com fotos)")
Layout da ferrovia modelo com tapume de passagem automatizado (V2.0): Este projeto é uma atualização de um dos projetos de automação de ferrovia modelo anterior, o layout da ferrovia modelo com tapume automatizado. Esta versão adiciona a funcionalidade de acoplamento e desacoplamento da locomotiva com o material circulante. A operação de
Layout de modelo de ferrovia automatizado operando em dois trens: 9 etapas

Layout de modelo de trem automatizado operando dois trens: Fiz um layout de modelo de trem automatizado com passagem lateral há um tempo. A pedido de um colega, tornei este Instrutível. Isso é um pouco semelhante ao projeto mencionado anteriormente. O layout acomoda dois trens e os opera alterna