Hexapod: Há alguns anos estou interessado em brincar e criar robôs e me inspirei muito no Zenta, aqui você encontra seu canal no Youtube https://www.youtube.com/channel/UCmCZ-oLEnCgmBs_T e sua web site http://zentasrobots.com.Você pode encontrar um. Última modificação: 2025-01-23 15:01

HackerBoxes Robotics Workshop: O HackerBoxes Robotics Workshop foi projetado para fornecer uma introdução muito desafiadora, mas agradável, aos sistemas robóticos DIY e também à eletrônica para amadores em geral. O Workshop de Robótica é projetado para expor o participante a esses importantes. Última modificação: 2025-01-23 15:01

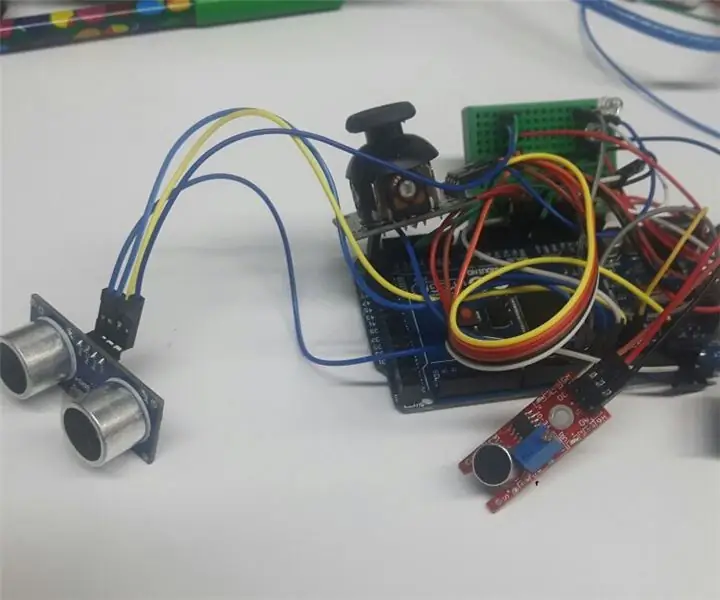
Robótica Manual Sem Fio Controlada por Gestos e Voz: Basicamente este foi nosso projeto de faculdade e por falta de tempo para enviar este projeto esquecemos de tirar fotos de algumas etapas. Também projetamos um código com o qual se pode controlar esta mão robótica usando gestos e voz ao mesmo tempo, mas devido a. Última modificação: 2025-01-23 15:01

Retro Radio Pi: Você já viu aqueles rádios antigos em lojas de lixo, ou em mercados de pulgas e pensou … cara, isso seria legal se ainda funcionasse. Bem, este tutorial pode não dar vida aos eletrônicos mortos que você pode ter encontrado, mas vai levar aquele velho shel. Última modificação: 2025-01-23 15:01
PIC Based LF e Avoiding Robot: IntroductionNeste instrutível, você aprenderá a fazer uma luz seguindo e evitando o robô. Minha inspiração vem de robôs que imitam o comportamento humano comum, por exemplo, você não vai simplesmente bater em uma parede sem motivo. Seu cérebro se comunica com inteligência. Última modificação: 2025-01-23 15:01

O robô mais fofo do batimento cardíaco: Qual é a primeira coisa que vem à sua mente, quando você vê um sensor ultrassônico? Eles parecem olhos. Não é mesmo? Com base nisso, construí um pequeno robô feito de alumínio, madeira e alguns componentes eletrônicos básicos. Se você gosta, vote em mim:. Última modificação: 2025-01-23 15:01

Google Assistant para PC / Mac / Linux: o Google Assistant é a resposta do Google ao assistente de casa inteligente Alexa da Amazon. Inicialmente disponível apenas com funcionalidade limitada no aplicativo Google Allo, o Google Assistant posteriormente implementado com os smartphones Google Home e Pixel. Última modificação: 2025-01-23 15:01

Domótica controlada por voz: Olá, Neste instrutível, vou ensiná-lo a fazer uma automação residencial controlada por voz. Vamos apenas acessar nosso celular e controlar nossos aparelhos por meio de nossa voz. Acredite em mim, não é tão difícil de fazer quanto parece. Basta seguir as etapas e. Última modificação: 2025-01-23 15:01

DJI Drone USB Cable Hack: Instagram: withered_perceptionEu odeio cabos e fios! Se você ler qualquer um dos meus outros Instructables, você saberia disso … Então vamos lá de novo … Simplificando, limpando e organizando minha vida. Última modificação: 2025-01-23 15:01
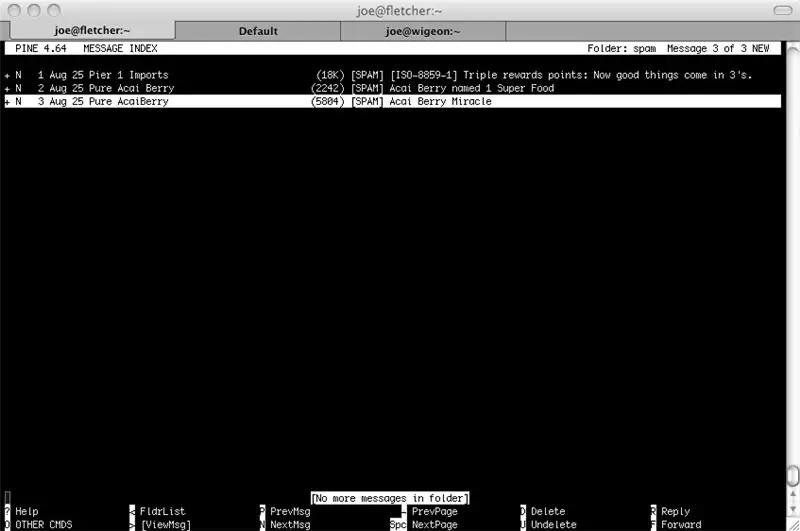
Como combater o spam usando Spamassassin, Dnsbl e Procmail: Eu executo meu próprio servidor de e-mail e verifico meu e-mail na maioria das vezes usando o pine. Ao longo dos anos, criei filtros de spam em pinho para eliminar o spam. Mas também sou conhecido por usar meu blackberry para verificar e-mails usando o squirrelmail. Bem, meus filtros de pinho di. Última modificação: 2025-01-23 15:01

Bright Saver com Arduino Mega: Bright Saver exibe informações precisas e atualizadas sobre economia e permite que você defina uma meta de economia. Por exemplo, depois de definir sua meta usando os dois botões fornecidos, você pode observar a progressão e quanto mais é necessário para alcançar seu objetivo. Última modificação: 2025-01-23 15:01
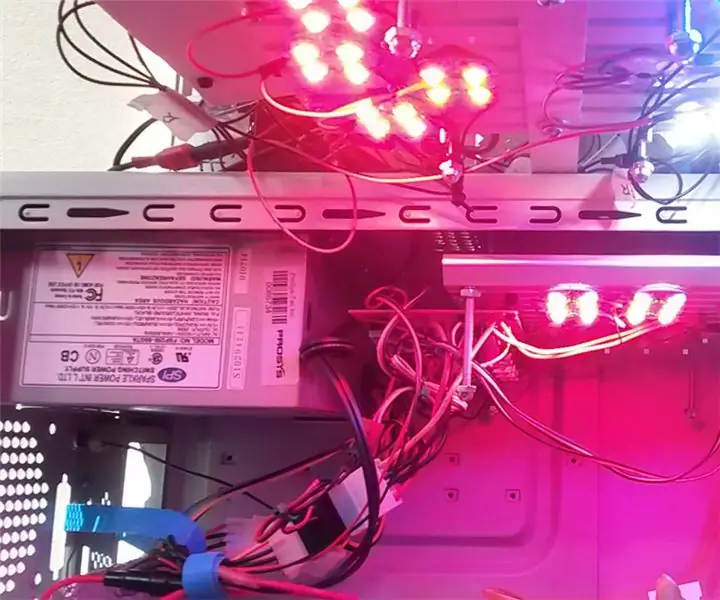
Lâmpada Grow LED de quatro cores com dimerização PWM: Esta é uma expansão da minha lâmpada Grow anterior instalada em um chassi de PC usado. Ele tem quatro canais de escurecimento PWM para LEDs vermelhos, vermelhos, azuis e brancos. Ser capaz de controlar a mistura da mistura de cores significa que você pode controlar o crescimento da raiz, da folha. Última modificação: 2025-01-23 15:01
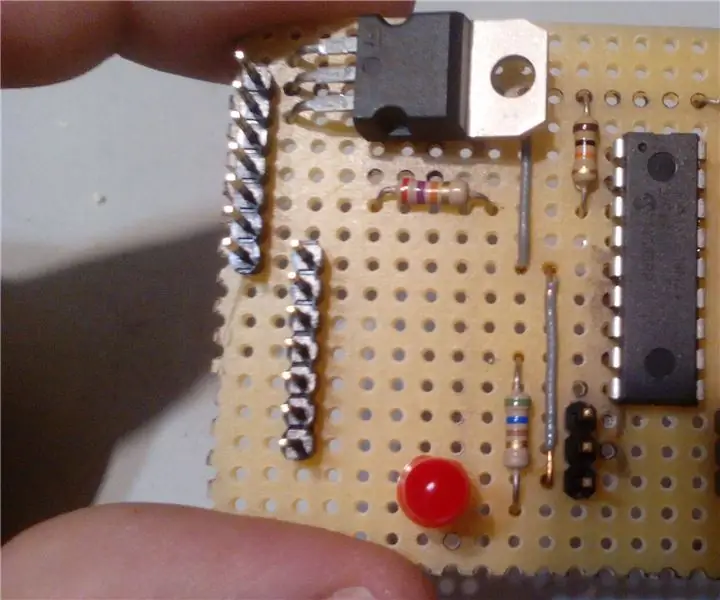
PLACA DE ROBÔ PICAXE BARATO E FÁCIL COM CABO SERIAL: Aqui estão as instruções sobre como construir uma PLACA PICAXE fácil, simples e barata para controlar um ROBÔ SUMO ou para usar em qualquer outro projeto PICAXE 18M2 +. Última modificação: 2025-01-23 15:01
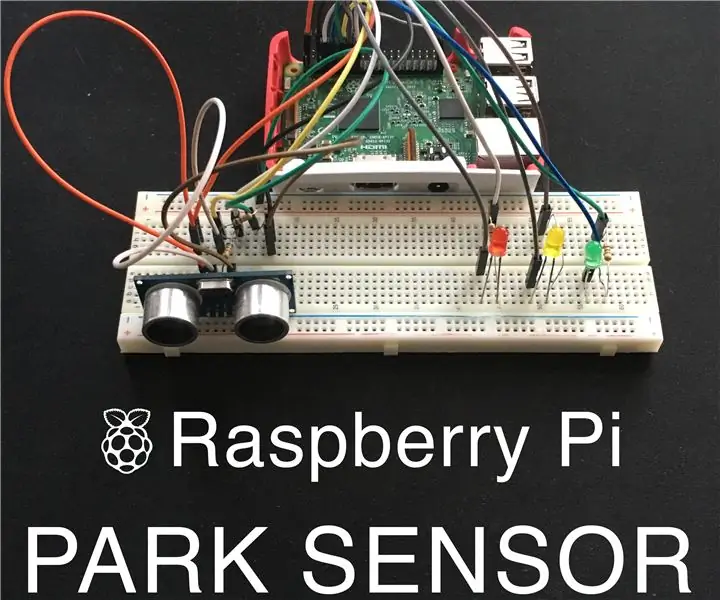
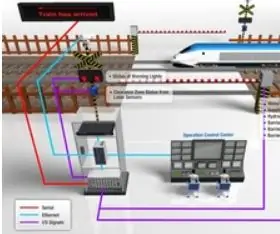
Sensor Raspberry Pi Park: Neste instrutível, iremos construir um sensor de parque. A ideia desse sensor de estacionamento é mostrar verde quando você tem espaço suficiente para puxar seu carro para frente no estacionamento e, em seguida, virar amarelo quando você se aproxima da posição totalmente para a frente, e então. Última modificação: 2025-01-23 15:01

FPV RC Car: Este projeto está na minha gaveta há algum tempo e eu, como a Maker Fair está chegando, foi um bom momento para fazê-lo. Há muito tempo, havia um jogo chamado " Micro Machines " para Sega Mega Drive (Genesis) que passo horas jogando. Bas. Última modificação: 2025-01-23 15:01
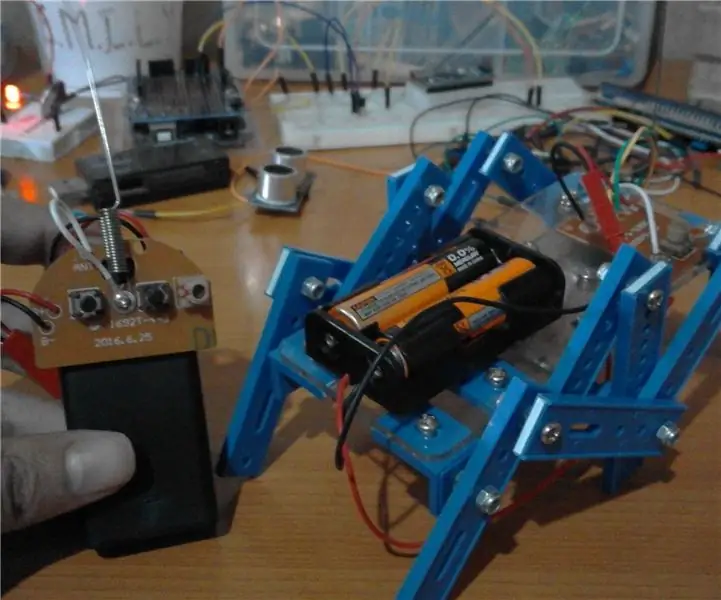
EMIREN ™ (O robô rastreador controlado por rádio): Extremamente viciado em robôs? Bem, estou aqui para mostrar e contar ao meu robô rastejante simples e básico. Eu o chamei de robô EMIREN. Por que EMIREN? Simples, é uma combinação de dois nomes a Emily e Waren [Emi (ly) + (wa) Ren = EmiRen = EMIREN] Neste projeto. Última modificação: 2025-01-23 15:01

Interface de Usuário Interativa Simples para Ensino e Avaliação .: Este projeto foi desenvolvido como parte de uma aula universitária, o objetivo era fazer um sistema interativo para ensinar e avaliar um determinado assunto. Para isso usamos um Processing em um PC para a interface e um Arduino NANO para o botão e LEDs de arcade, então. Última modificação: 2025-01-23 15:01

Sinal de néon da Apple: Isenção de responsabilidade: não possuo os direitos do logotipo, não criei o logotipo original e todos os direitos são propriedade da Apple … ou algo assim. Não sei o aspecto jurídico, mas acho que cobre. Eu não forneço qualquer garantia para nada, a responsabilidade é. Última modificação: 2025-01-23 15:01
Como consertar o problema de rolagem do mouse da Xiaomi: Assim como com qualquer outra ferramenta, um mouse de computador eventualmente precisaria de alguma manutenção devido ao seu uso contínuo. O desgaste normal do produto permite que ele funcione com menos eficiência do que era durante o tempo em que era b. Última modificação: 2025-01-23 15:01

Tutorial para ESP8266 ESPDuino NodeMcu SPI Module usando Arduino Uno: DescriptionThis ESP8266 ESPDuino NodeMcu SPI Module TFT display LCD tem resolução de 128 x 128 e 262 cores, ele usa interface SPI para se comunicar com controladores como Arduino Uno e ESP8266. Características: Tamanho: 1,44 polegadas Interface: Resolução SPI: 128. Última modificação: 2025-01-23 15:01

Alto-falante Bluetooth 360 portátil: ********************************************** ********************************** Atualização 2016/07/21: Atualizei os modelos 3D e os mais novos placa amplificadora potente (Funciona também com o amplificador anterior, para vocês que já pediram. Última modificação: 2025-01-23 15:01

Construir um PC Raspberry Pi por menos de US $ 140: atualização de março de 2017: Criar um PC baseado em Raspberry Pi com desempenho aceitável a um preço baixo para uso em aulas de alunos do ensino médio. A maioria das pessoas está familiarizada com os sistemas operacionais Windows ou MAC. Linux é um sistema operacional diferente. Um objetivo deste instrutível. Última modificação: 2025-06-01 06:06

Fonte de alimentação de bancada variável DIY baseada no LM317: Uma fonte de alimentação é, sem dúvida, um equipamento absolutamente necessário para qualquer laboratório de eletrônica ou qualquer pessoa que queira fazer projetos eletrônicos, especialmente uma fonte de alimentação variável. Neste tutorial, mostrarei como construí um regulamento positivo linear LM317. Última modificação: 2025-01-23 15:01

Como codificar o "álbum de recortes de um caminhante": as pessoas tendem a ser nostálgicas sobre hobbies que são importantes para elas, como caminhadas. Mas como você guarda a memória de uma caminhada? Sim, as fotos são uma opção. Este dispositivo permitiria outra opção de arquivo de dados da viagem. A pessoa teria um. Última modificação: 2025-01-23 15:01

Tutorial para L298 2Amp Motor Driver Shield para Arduino: DescriptionL298 2Amp Motor Driver Shield para Arduino é baseado no circuito integrado do motor L298, um driver de motor de ponte completa. Ele pode acionar dois motores CC 2A separados ou 1 motor de passo 2A. A velocidade e as direções do motor podem ser controladas separadamente. Última modificação: 2025-01-23 15:01

Carregador de telefone sem fio DIY e controle de LED: neste instrutível, demonstrarei como fazer um carregador de telefone sem fio e LEDs ativados. Incluirei código, PDFs, diagramas de fiação e arquivos Gerber, bem como uma lista de materiais para fazer seu próprio sem fio carregador de telefone. Nota especial: não. Última modificação: 2025-01-23 15:01

Roomba com MATLAB: Este projeto faz uso do MATLAB e de um robô programável iRobot Create2. Ao colocar nosso conhecimento do MATLAB à prova, somos capazes de programar o Create2 para interpretar imagens e detectar sinais. A funcionalidade do robô depende principalmente d. Última modificação: 2025-01-23 15:01
Educaccion: Resumo Neste projeto desenvolvemos um sistema multimídia para responder e atender a metodologia de educação denominada " Educaccion " qual busca fornecer o feedback ao professor e aos alunos sobre o processo de ensino e aprendizagem através de. Última modificação: 2025-01-23 15:01

Sensorland Adventure: Learning Video Game: A realidad aumentada es superponer objetos virtuais no mundo real com ayuda de um dispositivo “ Smart ” ya sea un celular una Tablet entre otros. Es una herramienta muy ú til para que as pessoas aprendam ya que não se sienten e. Última modificação: 2025-01-23 15:01
LifeGuard 2.0: Você já quis realizar operações matemáticas, fazer leituras de sensores, monitorar entradas analógicas e digitais e controlar saídas analógicas e digitais sem nenhuma experiência anterior em eletrônica? Se sim, este projeto é só para você! Estaremos usando um microcircuito. Última modificação: 2025-01-23 15:01
Construa seu próprio PC com Raspberry: Este projeto foi atualizado na quarta-feira, 15 de novembro de 2017. Hoje, veremos juntos como você pode criar seu próprio PC com desempenho aceitável por um preço baixo, baseado no raspberry pi, e por um orçamento inferior a $ 100.Para a maioria dos usuários, este computador w. Última modificação: 2025-01-23 15:01
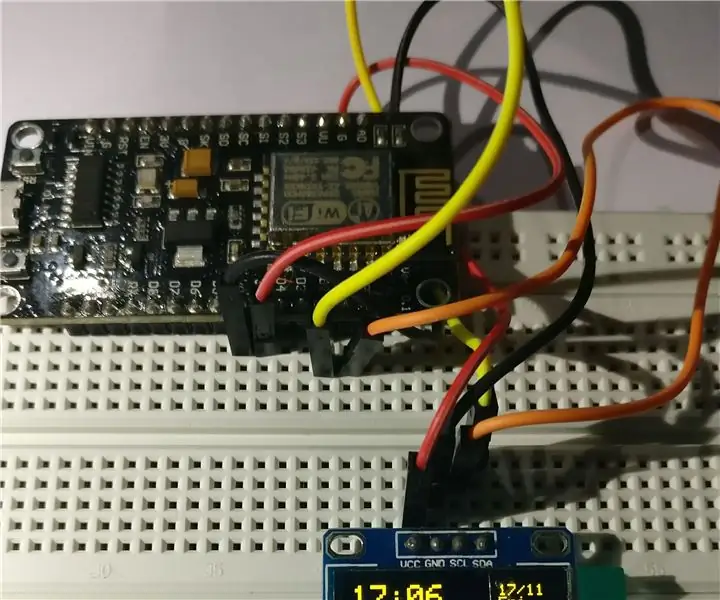
Relógio de rede baseado em ESP8266 e monitor de clima: Projeto de fim de semana curto e simples com ESP8266 e display OLED de 0,96 '' 128 x 64. O dispositivo é um relógio de rede, ou seja, busca o tempo de servidores ntp. Ele também exibe informações meteorológicas com ícones de openweathermap.orgParts. Requerido: 1. Módulo ESP8266 (A. Última modificação: 2025-01-23 15:01

Educaacción-UAO: Trata-se de um projeto de modelo funcional que foi desenvolvido num período de doze semanas pelo primeiro grupo de alunos da Arquitectura de Sistemas Multimedia, disciplina da carreira de Engenharia Multimédia da Universidad Aut ó noma de Occidente. E. Última modificação: 2025-01-23 15:01
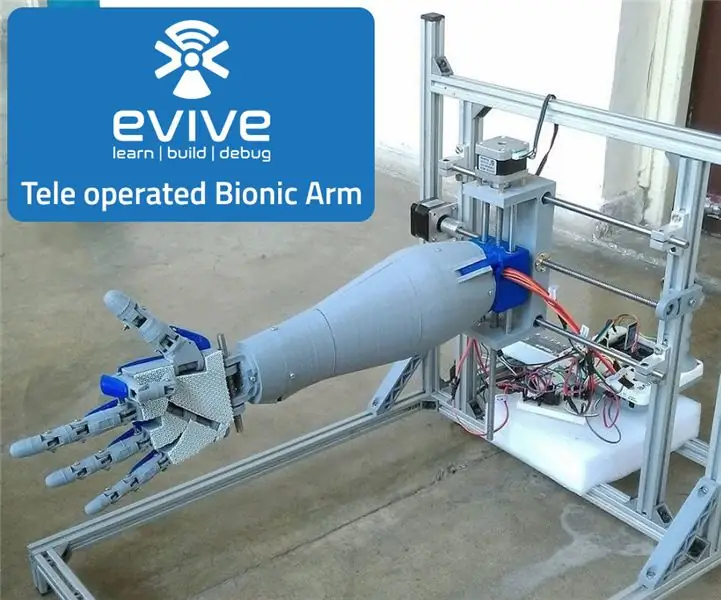
Braço biônico teleoperado: Neste Instrutível, faremos um braço biônico teleoperado, que é um braço robótico semelhante à mão humana com seis graus de liberdade (cinco para figuras e um para o pulso). É controlado com a mão humana através de uma luva que possui sensores flex atta. Última modificação: 2025-01-23 15:01

The Agricultural Sensor Array: Um projeto de Jackson Breakell, Tyler McCubbins e Jakob Thaler para EF 230Agriculture é um fator vital de produção nos Estados Unidos. As safras podem ser usadas para uma ampla variedade de finalidades diferentes, que vão desde matérias-primas para a produção de. Última modificação: 2025-01-23 15:01

Smart Rover: este é um smart rover usado para verificar quaisquer peças defeituosas em tubos e qualquer finalidade de segurança. Isso pode ser controlado por telefone inteligente usando endereço IP. O launchpad cc3200 é usado para reduzir os componentes devido ao excesso de peso. Última modificação: 2025-01-23 15:01
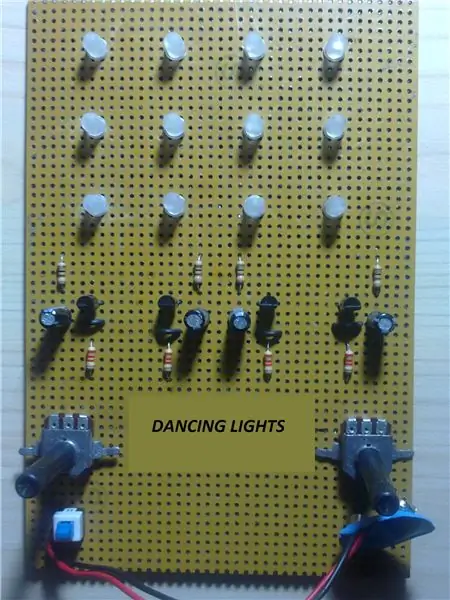
LUZES DE DANÇA: Este é um passo a passo instrutivo mostrando como acender doze LEDs em padrões diferentes usando apenas dois potenciômetros (potes). É um projeto muito simples e econômico que não requer nenhuma habilidade especial (exceto um pouco de solda), mas apenas. Última modificação: 2025-01-23 15:01

Use o módulo Bluetooth HC-06 para realizar a comunicação Micro: bit com o celular: Muitos amigos ao meu redor que jogam micro: bit me dizem que a conexão Bluetooth do micro: bit não é estável. É fácil desconectar. Se usarmos o micropython, o Bluetooth não pode nem mesmo ser colocado em uso. Antes que este problema seja resolvido por micro: bit offic. Última modificação: 2025-01-23 15:01

Travesseiro inteligente: Este manual de instruções descreve como fazer um travesseiro inteligente que é sensível ao ronco! O travesseiro inteligente depende da vibração para indicar ao adormecido quando ele ronca durante o sono. Funciona automaticamente quando uma pessoa encosta a cabeça no travesseiro. Sn. Última modificação: 2025-01-23 15:01
Educcacion: Este projeto consiste no desenvolvimento de um sistema multimídia, utilizando diferentes tecnologias como o Arduino em combinação com sensores e atuadores (pelo menos 3 de cada). Também este projeto pretende deixar os alunos da disciplina de computação física. Última modificação: 2025-01-23 15:01